|
Research Ideas and Outcomes :
Research Article
|
|
Corresponding author: Christopher John Topping (cjt@ecos.au.dk)
Academic editor: Xiaodong Duan
Received: 04 Jul 2022 | Accepted: 05 Jul 2022 | Published: 07 Jul 2022
© 2022 Christopher John Topping
This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation:
Topping CJ (2022) The Animal Landscape and Man Simulation System (ALMaSS): a history, design, and philosophy. Research Ideas and Outcomes 8: e89919. https://doi.org/10.3897/rio.8.e89919
|
|
Abstract
This article is the first article in the new topical RIO journal collection for ALMaSS. This editorial introduces ALMaSS, its history, component parts and philosophy, and forms a first access point for those interested in knowing more. It is written from my own personal perspective as the instigator and main developer for the system, effectively as the ‘father’ of ALMaSS.
Keywords
Landscape simulation, Individual-based simulation, Software ecosystems, Applied simulation modelling, Social-ecological simulation
A simple overview of ALMaSS
ALMaSS childhood years
ALMaSS was born as a functioning simulation system with its first use in Danish projects in 2000, but it was conceived as an idea in 1996. ALMaSS was a response to a request from the then Danish Ministry for Energy and Environment to be able to answer unspecified questions related to the impact of human management on wildlife. This rather unspecific question was the impetus for developing a then revolutionary and ambitious idea that became ALMaSS. At that time (and even today) the ecological modelling paradigm approached tasks by designing specific models for specific purposes, and as simply as possible. The idea for ALMaSS to represent landscapes and the animals contained in them in detail for applied use was considered by most as completely unrealistic, compared at one time to building a giant spaceship that would never fly.
The 1990s were a time of transition for individual-based models (IBMs), both from a methodological perspective and due to rapid computer hardware development. IBMs at that time were quite simple, often based on non-spatial expansion of stage-structured population models to the individual (
Initial ALMaSS design was based on programme development using a domain-specific language called Viola (
ALMaSS design
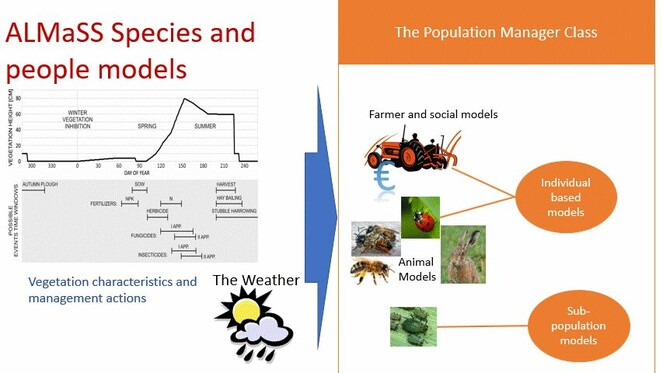
The underlying design from 1996 has changed little in 25 years. The basic separation is between the landscape simulation and agent-based models. The Landscape is a large C++ class that holds all the information and behaviour associated with the physical landscape and the farms and farm management contained therein. This class includes classification of habitats, mapping of the landscape, vegetation growth modelling and environmental fate modelling of pesticides. Farm management is represented in detail, with each farmer knowing which fields he manages and what rotation to apply, and then what management to apply to the field for a particular crop. Management can be flexible with changes in activities related to weather, history of management, and can be modified experimentally. Spatial resolution is a 1-m2 with a usual time-step for landscape modelling of one-day. The overall size of landscape simulated is dependent on the power of the computers used to run simulations, but typically 10x10 km is used. This landscape simulation basis has been significantly expanded recently but remained rather constant until the last two or three years.
The agent-based animal model included at launch was the field vole (Microtus agrestis). This was quickly followed by the skylark (Alauda arvensis) (
Combining both the Landscape and PopulationManager together provides the environment for these detailed behavioural models, allowing the animal agents to sense information from their surroundings and to use this to act/behave to fulfil their own agenda, i.e., a definition of agents in agent-based models.
ALMaSS philosophy and the teenage period
Like any child, ALMaSS suffered from growing pains, also like the unusual child in the class it was not well understood or always accepted by the other children. It took almost 15 years to break through some of these barriers, before mainstream acceptance occurred.
ALMaSS did not fit the simple modelling paradigm, and ecology did not seem ready to embrace this alternative approach. The key to unlock further progress was probably the publishing of the underlying philosophy guiding ALMaSS modelling (
ALMaSS today
The ALMaSS system has matured considerably with particularly rapid growing spurts over the last five years. The initial list of agent-based model species has expanded since the early years, key ALMaSS species now implemented include the European brown hare (
Much of the new work has been related to pesticides and risk assessments (e.g.,
A new departure for ALMaSS is the inclusion of subpopulation modelling for very numerous or simple species. This works by dividing the landscape into small areas (e.g., 10x10m) to represent each sub-population, then defining the rules by which individuals will move between sub-populations, whilst otherwise treating the sub-population as a stage-structured population model. This approach is currently being applied for modelling aphids, lacewings and some pests of olives.
From the human perspective, ALMaSS has been used in studies of farmers (
All these new developments are supported by extensions of the ALMaSS landscape capability which now includes 12 countries in Europe (Fig.
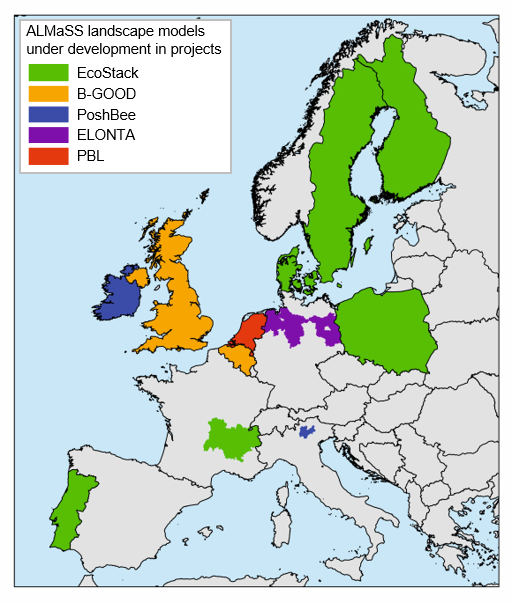
This component has been made possible through long-standing collaboration with colleagues from Krakow and Coimbra. They form part of an expanding network of researchers currently contributing and developing ALMaSS components for the future. Many exciting initiatives are underway and the number of people in the ALMaSS network continues to grow.
All these expansions feed towards the use of ALMaSS as a multi-criteria decision making support system (
Compared to ALMaSS, most ecological models do not survive beyond infancy. They are designed for specific purposes and like cardboard boxes they are discarded or recycled after use. In contrast, ALMaSS was designed to represent systems not cases, it is flexible and adaptable, and has lived for over 20 years already. Thus, as ALMaSS moves from adolescence to maturity, the future seems bright for a long and fruitful life in research and policy support.
References
- Life history traits interact with landscape composition to influence population dynamics of a terrestrial arthropod: A simulation study.Ecoscience11(1):64‑73. https://doi.org/10.1080/11956860.2004.11682810
- Reflective agents in meta-logic programming.Lecture Notes in Computer Science649:135‑147. https://doi.org/10.1007/3-540-56282-6_9
- Landscape structure mediates the effects of a stressor on field vole populations.Landscape Ecology28(10):1961‑1974. https://doi.org/10.1007/s10980-013-9932-7
- ApisRAM Formal Model Description.EFSA Supporting Publications19(2):7184. https://doi.org/10.2903/sp.efsa.2022.EN-7184
- Pattern-oriented modeling of agent-based complex systems: Lessons from ecology.Science310(5750):987‑991. https://doi.org/10.1126/science.1116681
- Modelling roe deer (Capreolus capreolus) in a gradient of forest fragmentation: behavioural plasticity and choice of cover.Canadian Journal of Zoology-Revue Canadienne De Zoologie82(9):1528‑1541. https://doi.org/10.1139/z04-131
- Evaluating the effect of corridors and landscape heterogeneity on dispersal probability: a comparison of three spatially explicit modelling approaches.Ecological Modelling181(4):445‑459. https://doi.org/10.1016/j.ecolmodel.2003.11.019
- Evaluating the role of behavioral factors and practical constraints in the performance of an agent-based model of farmer decision making.Agricultural Systems143:136‑146. https://doi.org/10.1016/j.agsy.2015.12.014
- Applying a biocomplexity approach to modelling farmer decision-making and land use impacts on wildlife.Journal of Applied Ecology55(3):1445‑1455. https://doi.org/10.1111/1365-2664.13024
- Implementing I-state configuration models for population-dynamics - an object-oriented programming approach.Ecological Modelling68(1-2):75‑89. https://doi.org/10.1016/0304-3800(93)90109-6
- European hares do not avoid newly pesticide-sprayed fields: Overspray as unnoticed pathway of pesticide exposure.Science of the Total Environment715https://doi.org/10.1016/j.scitotenv.2020.136977
- Impact assessment predicted by means of genetic agent-based modelling.Critical Reviews in Toxicology34(6):487‑498. https://doi.org/10.1080/10408440490519795
- The use of agent-based modelling of genetics in conservation genetics studies.Journal for Nature Conservation (Jena12(2):111‑120. https://doi.org/10.1016/j.jnc.2003.12.001
- The influence of landscape diversity and heterogeneity on spatial dynamics of agrobiont linyphiid spiders: An individual-based model.BioControl50(1):1‑33. https://doi.org/10.1007/s10526-004-1114-8
- VIOLA: a new visual programming language designed for the rapid development of interacting agent systems.Acta biotheoretica47(2):129‑140. https://doi.org/10.1023/A:1002070223107
- ALMaSS, an agent-based model for animals in temperate European landscapes.Ecological Modelling167(1-2):65‑82. https://doi.org/10.1016/S0304-3800(03)00173-X
- Modelling the loss of genetic diversity in vole populations in a spatially and temporally varying environment.Annales Zoologici Fennici40(3):255‑267.
- "Population-Level Risk Assessment of Pesticides Using A Tiered Model Procedure.".Poster presented at SETAC conference, North America. https://doi.org/10.13140/RG.2.2.18879.97449
- Modeling the influence of temporal and spatial factors on the assessment of impacts of pesticides on skylarks.Environmental Toxicology and Chemistry23(2):509‑520. https://doi.org/10.1897/02-524a
- Risk assessment of UK skylark populations using life-history and individual-based landscape models.Ecotoxicology14(8):925‑936. https://doi.org/10.1007/s10646-005-0027-3
- The potential for the use of agent-based models in ecotoxicology.Ecotoxicology Modeling. J. DevillersSpringer:205‑235. https://doi.org/10.1007/978-1-4419-0197-2_8
- A pattern-oriented modelling approach to simulating populations of grey partridge.Ecological Modelling221(5):729‑737. https://doi.org/10.1016/j.ecolmodel.2009.11.004
- Opening the black box-Development, testing and documentation of a mechanistically rich agent-based model.Ecological Modelling221(2):245‑255. https://doi.org/10.1016/j.ecolmodel.2009.09.014
- Recovery based on plot experiments is a poor predictor of landscape-level population impacts of agricultural pesticides.Environmental Toxicology and Chemistry33(7):1499‑1507. https://doi.org/10.1002/etc.2388
- Per Aspera ad Astra: Through Complex Population Modeling to Predictive Theory.American Naturalist186(5):669‑674. https://doi.org/10.1086/683181
- Towards a landscape scale management of pesticides: ERA using changes in modelled occupancy and abundance to assess long-term population impacts of pesticides.Science of the Total Environment537:159‑169. https://doi.org/10.1016/j.scitotenv.2015.07.152
- Landscape structure and management alter the outcome of a pesticide ERA: Evaluating impacts of endocrine disruption using the ALMaSS European Brown Hare model.Science of the Total Environment541:1477‑1488. https://doi.org/10.1016/j.scitotenv.2015.10.042
- Landscape-scale simulations as a tool in multi-criteria decision making to support agri-environment schemes.Agricultural Systems176:102671. https://doi.org/10.1016/j.agsy.2019.102671
- Overhaul environmental risk assessment for pesticides.Science367(6476):360‑363. https://doi.org/10.1126/science.aay1144
- Where to go goose hunting? Using pattern-oriented modeling to better understand human decision processes.Human Dimensions of Wildlife23(6):533‑551. https://doi.org/10.1080/10871209.2018.1509249